






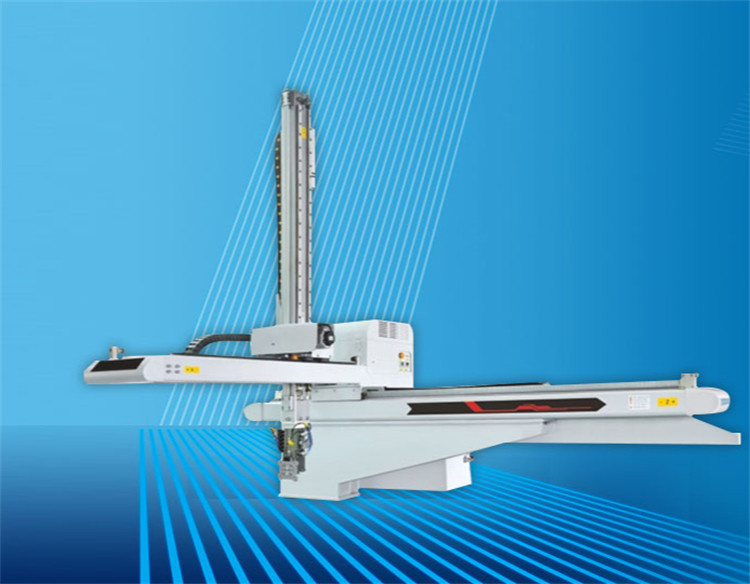
机械手-注塑机机械手-天智星
广东天智星机器人有限公司
经营模式:生产加工
地址:广东省东莞市谢岗镇曹乐同心路一巷6号101室
主营:注塑机械手,压铸机械手,冲压机械手,水平机器人
业务热线:1353-9001529

产品详情
联系方式
产品品牌:天智星
供货总量:不限
价格说明:议定
包装说明:不限
物流说明:货运及物流
交货说明:按订单
有效期至:长期有效
机械手-注塑机机械手-天智星
斜臂机械手厂家,打磨机械手厂家,注塑机器人厂家
在实际应用中,车床机械手可以与数控车床集成,实现车削、钻孔、攻丝等多种加工工序的自动执行,减少人力投入。同时,机械手可以准确快速地完成工件的上料和下料动作,实现生产线的自动化衔接。此外,车床机械手还可以与其他自动化设备协同工作,如自动换刀器、自动清洗设备等,实现更加的自动化生产。车床机械手的控制系统通常采用PLC,操作简单方便,能够使操作者快速入门,提高操作安全性。机械手机械手






搬运机械手是一种在工业自动化生产线中用于自动执行搬运和移动物品的设备。它们通过提高生产效率和减少人力成本来优化生产流程。搬运机械手的工作原理主要包括以下几个步骤:
传感器感知:机械手使用传感器来感知物品的位置和形状,这些传感器可能包括摄像头、激光雷达或超声波传感器等。
控制系统编程:在工作前,需要对机械手的控制系统进行编程,其动作和运动轨迹,确保机械手能够正确抓取和搬运物品。
执行机构运动:控制系统编程完成后,执行机构根据指令开始运动,通过电机、液压或气动等方式实现机械手的运动和抓取物品。
抓取物品:机械手到达位置后,利用其抓取装置抓取物品,抓取装置会根据物品的形状和重量进行相应的调整。
搬运物品:抓取物品后,机械手将物品搬运到位置或传送到其他机械设备上进行进一步加工。
机械手

伺服机械手是一种高度自动化的设备,它能够模仿人体手臂的某些动作和功能,实现对产品的抓取、对象的处理或工具和设备的自动操作。这些机械手具备动作灵活、定位准确、负载驱动力高和环境适应力强等特点,广泛应用于钢铁、海洋、石油、化工、物流搬运等生产自动化行业,显著减轻了工人的劳动强度,提高了生产效率和产品质量。
伺服机械手的工作原理通常涉及多个自由度的机构,如夹取机构、俯仰机构、推拉机构及回转机构等,它们共同构成机械手的姿态调整系统。这些机构通常由液压马达、液压缸等驱动,通过电液伺服控制实现的运动和定位。例如,回转机构由液压马达驱动机械手旋转,俯仰机构由液压缸驱动机械手举升,而手抓机构则由液压马达和液压缸控制手抓的旋转与夹取。
机械手


王先生先生
手机:13824278735


